模块设计 🏗
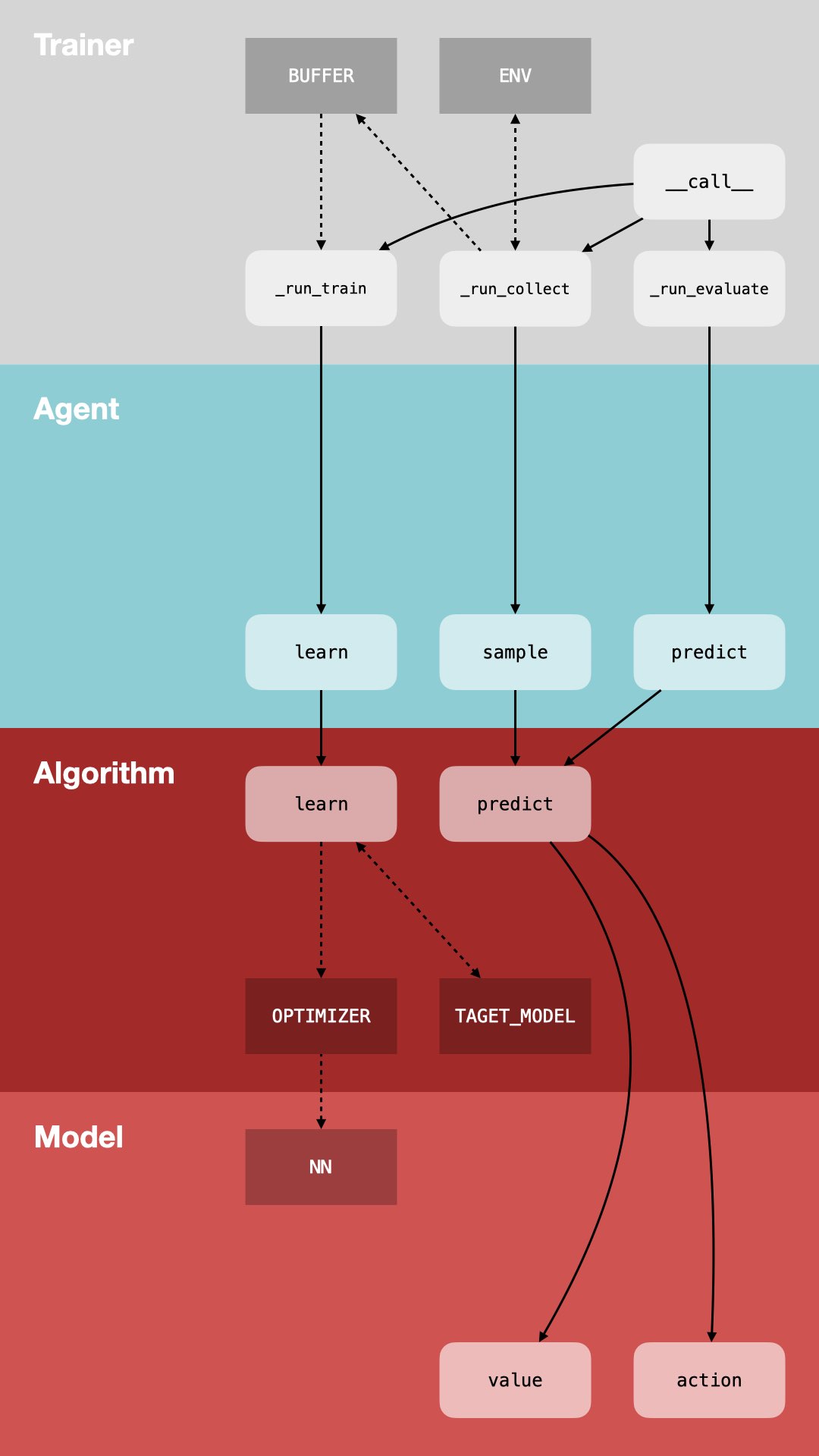
每个算法以 Model📦, Algorithm👣, Agent🤖, Trainer🔁 四个类为主组成,并以组合的方式进行交互。
Model📦:定义单个或多个前向网络;输入是环境状态,输出是网络的原始输出。Algorithm👣:定义Model📦的更新算法和Model📦输出的后处理(argmax, ...)。Agent🤖:定义Algorithm👣与环境交互的接口和训练数据的预处理。Trainer🔁:定义Agent🤖的整体训练流程和辅助训练的工具(Buffer, ...)。
调用 Trainer.__call__ 函数将得到一个生成器📽,该生成器保存了训练流程和所有相关数据。生成器每步返回一个 log_data 训练日志📒,持续调用该生成器即可完成训练并得到所有 log_data。
logger📊 部分使用 Tensorboard 和 Weights & Biases 记录训练日志。对 Trainer.__call__ 函数进行装饰,具体实现见核心代码。
Note
🧵 实线表示函数调用关系;虚线表示数据流向。
abstractions.py
class Model(nn.Module):
def __init__(self, **kwargs) -> None:
pass
def value(self, x: torch.Tensor, a: Optional[torch.Tensor] = None) -> tuple[Any]:
# 返回 单个 或 多个 critic 的输出值
pass
def action(self, x: torch.Tensor) -> tuple[Any]:
# 返回 动作 | 动作概率分布
pass
class Algorithm:
def __init__(self, **kwargs) -> None:
self.model = Model(**kwargs)
# 1. 初始化 model, target_model
# 2. 初始化 optimizer
pass
def predict(self, obs: torch.Tensor) -> tuple[Any]:
# 返回 动作 | 动作概率分布 | Q函数的预估值
pass
def learn(self, data: BufferSamples) -> dict[str, Any]:
# 根据训练数据(观测量和输入的reward),定义损失函数,用于更新 Model 中的参数。
# 1. 计算目标
# 2. 计算损失
# 3. 优化模型
# 4. 返回训练信息
pass
def sync_target(self) -> None:
# 同步 model 和 target_model
pass
class Agent:
def __init__(self, **kwargs) -> None:
self.alg = Algorithm(**kwargs)
# 1. 初始化 Algorithm
# 2. 初始化 运行步数变量
pass
def predict(self, obs: np.ndarray) -> np.ndarray:
# 1. obs 预处理 to_tensor & to_device
# 2. Algorithm.predict 得到 act
# 3. act 后处理 to_numpy & to_cpu
# 4. 返回评估使用的 act
pass
def sample(self, obs: np.ndarray) -> np.ndarray:
# 1. obs 预处理 to_tensor & to_device
# 2. Algorithm.predict 得到 act
# 3. act 后处理 to_numpy & to_cpu
# 4. 返回训练使用的 act
pass
def learn(self, data: BufferSamples) -> dict[str, Any]:
# 数据预处理
# 调用 Algorithm.learn
# 返回 Algorithm.learn 的返回值
pass
class Trainer:
def __init__(self, **kwargs) -> None:
self.agent = Agent(**kwargs)
# 1. 初始化参数
# 2. 初始化训练和评估环境
# 3. 初始化 Buffer
# 4. 初始化 Agent
pass
def __call__(self) -> Generator[dict[str, Any], None, None]:
# 1. 规定训练流程
# 2. 返回一个生成器,生成器每步返回一个 log_data 字典
pass
def _run_collect(self) -> dict[str, Any]:
# 1. 采样一步,并加入到 Buffer 中
# 2. 返回 log_data 字典
pass
def _run_train(self) -> dict[str, Any]:
# 1. 从 Buffer 取出一组训练数据
# 2. 训练单步
# 3. 返回 log_data 字典
pass
def _run_evaluate(self, n_steps: int = 1) -> dict[str, Any]:
# 1. 评估多步
# 2. 返回 log_data 字典
pass
if __name__ == "__main__":
trainer = Trainer()
for log_data in trainer():
print(log_data)